Robotic Perception
- Place Recognition with Robustness to Strong Perceptual Aliasing And Appearance Variations
- Fei Han, Sriram Siva, and Hao Zhang, "Scalable representation learning for long-term augmented reality-based information delivery in collaborative human-robot perception," in International Conference on Virtual, Augmented and Mixed Reality (VAMR), 2019. [bibtex]
- Kai Liu, Hua Wang, Fei Han, and Hao Zhang, "Visual Place Recognition via Robust l2-norm Distance Based Holism And Landmark Integration," in AAAI Conference on Artificial Intelligence (AAAI), 2019. [bibtex]
- Fei Han, Saad Elbeleidy, Hua Wang, Cang Ye, and Hao Zhang, "Learning of Holism-Landmark Graph Embedding for Place Recognition in Long-Term Autonomy," IEEE Robotics and Automation Letters (RA-L), accepted. [bibtex] [The contents of this paper were also selected by IROS'18 Program Committee for presentation at the Conference]
- Fei Han, Hua Wang, and Hao Zhang, "Learning of Integrated Holism-Landmark Representations for Long-Term Loop Closure Detection," in AAAI Conference on Artificial Intelligence (AAAI), 2018, accepted. [bibtex]
- Fei Han, Hua Wang, Guoquan Huang, and Hao Zhang, "Sequence-Based Sparse Optimization Methods for Long-Term Loop Closure Detection in Visual SLAM," Autonomous Robots (AuRo), accepted. [bibtex]
- Fei Han, Xue Yang, Yiming Deng, Mark Rentschler, Dejun Yang, and Hao Zhang, "SRAL: Shared Representative Appearance Learning for Long-Term Visual Place Recognition," IEEE Robotics and Automation Letters (RA-L), vol. 2, no. 2, pp. 1172-1179, April 2017 [bibtex] [project] [code]
- Fei Han, Xue Yang, Yiming Deng, Mark Rentschler, Dejun Yang, and Hao Zhang, "Life-Long Place Recognition by Shared Representative Appearance Learning," in Robotics: Science and Systems (RSS) Workshop of Visual Place Recognition: What is it Good For?, 2016. [bibtex] [project] [slides] [poster] [code]
- Hao Zhang, Fei Han, and Hua Wang, "Robust multimodal sequence-based loop closure detection via structured sparsity," in Robotics: Science and Systems (RSS), 2016, (Acceptance Rate: 20.6%, Best Paper Finalist). [bibtex] [slides] [poster]
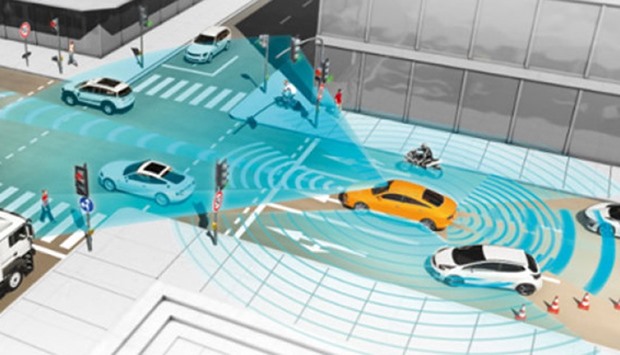
- Object Recognition and Localization in Autonomous Driving
- Real-time Activity Recognition
- Fei Han, Brian Reily, William Hoff, and Hao Zhang, "Space-Time Representation of People Based on 3D Skeletal Data: A Review," Computer Vision and Image Understanding (CVIU), vol. 158, pp. 85-105, May 2017. [bibtex]
- Fei Han, Xue Yang, Christopher Reardon, Yu Zhang, Hao Zhang, "Simultaneous Feature and Body-Part Learning for Real-Time Robot Awareness of Human Behaviors," in IEEE International Conference on Robotics and Automation (ICRA), 2017, accepted. [bibtex] [project] [code]
- Fei Han, Christopher Reardon, Lynne Parker, Hao Zhang, "Minimum Uncertainty Latent Variable Models for Robot Recognition of Sequential Human Activities," in IEEE International Conference on Robotics and Automation (ICRA), 2017, accepted. [bibtex]
- Brian Reily*, Fei Han*, Lynne Parker, and Hao Zhang, "Skeleton-Based Bio-Inspired Human Activity Prediction For Real-Time Human-Robot Interaction," Autonomous Robots (AuRo), accepted. * Equal contribution [bibtex]
Loop closure detection is an essential component for simultaneously localization and mapping in a variety of robotics applications, i.e. autonomous driving. One of the most challenging problems is to perform long-term place recognition with strong perceptual aliasing and appearance variations due to changes of illumination, vegetation, weather, etc. To address this challenge, we are developing novel robust methods for long-term place recognition, by formulating image sequence matching as an optimization problem regularized by structured sparsity-inducing norms. Our framework is able to model the sparsity nature of place recognition, i.e., the current location should match only a small subset of previously visited places, as well as to model underlying structures of image sequences and incorporate multiple feature modalities to construct a discriminative scene representation.

A new robust object recognition and localization algorithm for autonomous driving applications is being developed, which fuzes camera and radar sensor data simultaneously.
Human activity understanding is a critical research problem in robotics with many important real-world applications such as human-robot interaction. After comprehensively reviewing the state-of-art approaches on 3D human skeleton representations, we are developing high-speed human activity recognition methods with high accuracy at the same time.

Decision-making Under Uncertainty
- Decision making under uncertainty in human-robot teaming scenarios
- Fei Han and Hao Zhang, "Team Intent Understanding through Latent Representation Learning for Underground Search and Rescue," in Workshop of IEEE International Conference on Robotics and Automation (ICRA), 2018. [bibtex]
- Christopher Reardon, Fei Han, Hao Zhang, and Jonathan Fink, "Optimizing Autonomous Surveillance Route Solutions from Minimal Human-Robot Interaction," in IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2017, accepted. [bibtex]
- Onsite workflow guide using augmented reality (AR) techniques
- Fei Han, Jiayi Liu, William Hoff, and Hao Zhang, "Planning-based Workflow Modeling for AR-enabled Automated Task Guidance," in IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2017, accepted. [bibtex]
Bridging the Gap Between Perception and Decision Making
Apprenticeship learning has recently attracted a wide attention due to its capability of allowing robots to learn physical tasks directly from demonstrations provided by human experts. Most previous techniques assumed that the state space is known a priori or employed simple state representations that usually suffer from perceptual aliasing. Different from previous research, we are developing novel approaches that are capable to simultaneously fusing temporal information and multimodal data, and to integrate robot perception with decision making.
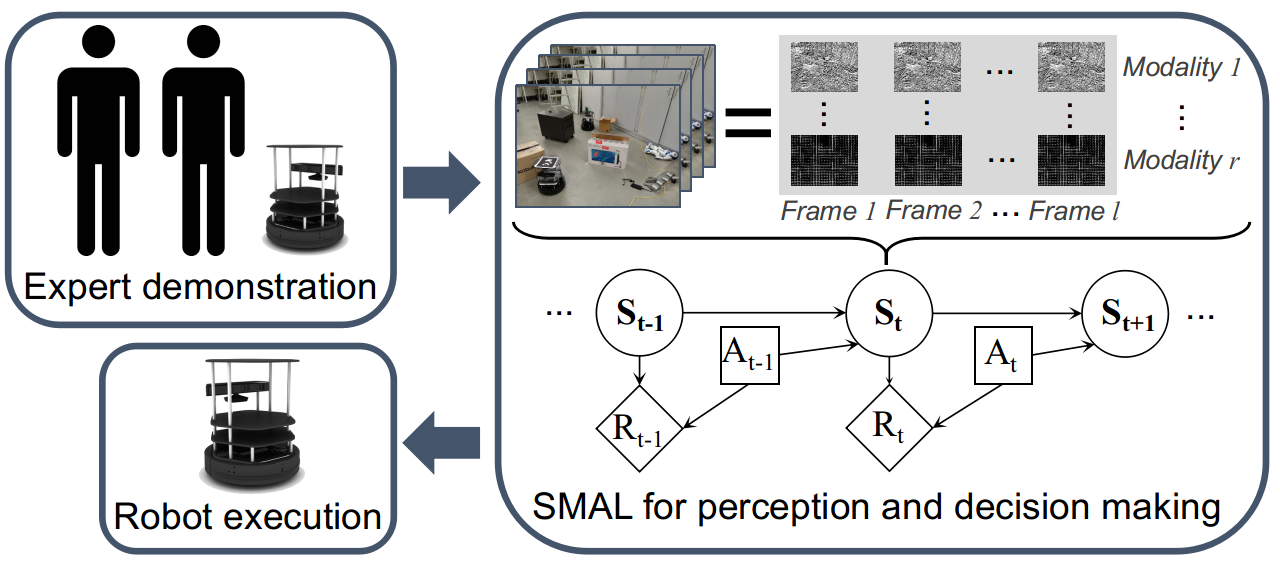
- Fei Han, Xue Yang, Yu Zhang, and Hao Zhang, "Sequence-based Multimodal Apprenticeship Learning For Robot Perception and Decision Making," in IEEE International Conference on Robotics and Automation (ICRA), 2017, accepted. [bibtex]